In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots
and Systems (IROS'06), Pages 2711-2716, Beijing, China, October 2006.
Sounds Good: Simulation and Evaluation of Audio
Communication for Multi-Robot Exploration
Pooya Karimian
Richard Vaughan
Sarah Brown
Autonomy Lab, School of Computing Science, Faculty of Applied
Sciences
Simon Fraser University, Burnaby, BC V5A 1S6, Canada
Email: [pkarimia,vaughan,sbrown1]@cs.sfu.ca
Abstract
In order to guide the design of a new multi-robot system, we seek
to evaluate two different designs of audio direction sensor. We
have implemented a simple but useful audio propagation simulator as
an extension to the Stage multi-robot simulator. We use the
simulator to evaluate the use of audio signals to improve the
performance of a team of robots at a prototypical search task. The
results indicate that, for this task, (i) audio can significantly
improve team performance, and (ii) binary discrimination of the
direction of a sound source (left/right) performs no worse than
high-resolution direction information. This result suggests that a
simple two-microphone audio system will be useful for our real
robots, without advanced signal processing to find sound direction.
1 Introduction
Numerous types of sensors and emitters have been used in robots.
Audio (defined as sound signals at human-audible frequencies) is
occasionally used, but is by no means as popular as the cameras and
range finders fitted to most mobile robots. In contrast, we observe
that audio signaling is extensively exploited by animals. The most
obvious example is human speech communication, but many non-human
mammals, birds and insects also use sound in spectacular ways. Of
particular interest to the multi-robot systems builder is the use
of audio signals to organize the behavior of multi-agent systems,
for example by sounding alarm calls or establishing territories.
In robots, audio is used both for passively sensing the environment
and as a means of communication. Buzzers and beepers are common
debugging tools, allowing humans to perceive aspects of a robot's
internal state over several meters and without line-of-sight. Some
systems, including research robots and toys, have speech
synthesizers to make human-understandable sounds. Conversely,
speech recognition systems have been employed for robot control by
humans.
But the use of audio as a robot-to-robot communication medium is
not well studied. The most common means of communication between
robots is through wireless data links which have the advantages of
being robust, fast and relatively long range. Line-of-sight
communication systems are also used, usually implemented using
infrared signaling and the IRDA protocol. However, there are some
interesting properties of sound which may make it attractive as an
alternative or complementary medium for robot-robot communication.
First, unlike light- or infrared-based systems, audio signals do
not need line of sight. Audio is propagated around obstacles by
diffraction and by reflection from surfaces. However, reflected
audio signals may be greatly attenuated as their energy is
partially absorbed by the reflecting material. Audio signals are
typically affected by robot-scale obstacles much more strongly than
are radio signals. The strong interaction between audio and the
robot-traversable environment means that useful
environmental information can be obtained from a received
audio signal in addition to information encoded into the signal by
its producer.
This insight can be seen to motivate previous work using audio in
robots. For example, robots can follow an intensity gradient to
find a sound source. In many environments, such as an office
building, the intensity gradient closely follows the traversable
space for a robot. Further, the steepest intensity gradient
generally takes the shortest path from source to the robot. Huang
[
1] showed
sound-based servoing for mobile robots to localize a sound source.
Østergaard [
2] showed
that even with a single microphone, an audio alarm signal has a
detectable gradient which can be used to track down the path toward
the sound source and they used the audio signals to help solve a
multiple-robot-multiple-task allocation problem.
Animals, including humans, have the ability to identify the 3D
direction of sound source (with some limitations). A mechanism that
performs this task with amazing precision has been extensively
studied in owls [
3]. Several authors, e.g. [
4], have demonstrated artificial sensor
systems that can accurately localize sound sources. Our interest is
in designing systems of many small, low-cost robots, each with
relatively little computational power and memory. Microphones are
attractively low-cost, and we aim to leverage the power of these
sensors as demonstrated by their use in animals. We desire to keep
our robots as simple as possible, to allow us to examine minimal
solutions to robotics problems.
The question that motivated the work in this paper is simple: do
our robots need accurate sound localization to get significant
benefits from audio signaling?
2 Tools and
Task Definition
In addition to microphones, our robots are equipped with some other
low-cost sensors: a single loudspeaker, infrared rangers, and a
low-resolution CCD camera with the ability to detect two different
color markers. The world is large compared to the size of the
robots, and accurate global localization is not feasible. To guide
the design of the real robots we model these sensors in the
Player/Stage [
5] robot interface and simulation system. At the
time of writing the standard Stage distribution does not simulate
audio communication between robots, so we extend Stage with an
audio propagation model. The model makes the simplifying assumption
that sounds traverse the shortest path from speaker to microphone
and the received signal intensity is a function only of the length
of the traversed path.
Audio may be useful in many practical robot applications. As a
motivating example, we examine a general resource-transportation
task which requires robots to explore the world to find the
(initially unknown) location of a source and sink of
resources, and then to move between the source (loading) and
the sink (unloading) locations. The metric of success is the time
taken for the entire team to complete a fixed number of trips
between the source and the sink. The importance of this task is
that it is functionally similar to various exploration and
transportation scenarios and it has been previously studied (e.g.
[
6]).
The robots are individually autonomous and do not have a shared
memory or map. The source and sink locations are initially unknown
and the robots must find them by exploring the environment. It is
straightforward to implement a robot that can perform this task
with these constraints.
The amount of work done - measured by the total number of
source-to-sink traverses per unit time - can be increased by adding
additional robots. If the robots act independently, performance
increases linearly with the number of robots added until
interference between robots becomes significant [
7]. If the robots are not independent, but
instead actively cooperate by sharing information, we can expect to
improve performance further. In these experiments we examine the
effects on overall system performance when robots generate audio
signals to announce the proximity of a target. On hearing an audio
signal, a robot can head in the direction from which the signal was
received, and thus reduce the time it takes to find a target. We
expect that the robots can reach more targets if they signal to
each other in this way, and indeed our results show this effect.
The more interesting experiment is to severely restrict the robot's
ability to detect sound direction. We examine the difference in
performance between robots that can determine the direction of a
sound source with perfect accuracy, and those that can tell only if
the sound was louder at the front or rear microphone: 1 bit of
direction information. The 1-bit system is significantly easier and
less computationally costly to implement, so it is useful to see
how it performs compared to an idealized perfectly accurate
direction sensor.
3 Audio
Model
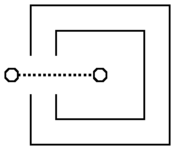
Figure 1: The shortest-path audio model models the large
difference in received signal intensity in the scenarios depicted
in (a) and (b). In this figure, solid lines are walls, circles are
the sender and receiver robots locations and dotted lines are
shortest audio paths.
Audio propagation in an office-like environment is very complex.
Sound waves are partially reflected, partially absorbed and
partially transmitted by every material with which they interact.
Different materials interact with the signal in frequency- and
amplitude-dependent ways. Physically accurate modeling is very
challenging. We take a pragmatic approach similar to those used in
computer games where the simulation needs to be realistic
enough to be useful, while being computationally feasible to
run at approximately real-time [
8].
Our model models the sound propagation by the shortest-path from
speaker to microphone only. Reflections or multiple paths are not
modeled and audio is not transmitted through solid walls. This
simple model is sufficient to exhibit some of the useful features
of the real audio transmission, such as the locality and
directionality of sound and the existence of local environmental
gradients. For example the shortest-path audio model models the
large difference in received signal intensity in the scenarios
depicted in Fig.
III and
Fig.
III.
To compute the shortest-path from sound source to sound sensor
without passing through walls, a visibility graph is generated
[
9] [
10]:
For a map M in which obstacles are defined as a set of
polygonal obstacles S, the nodes of visibility graph are the
vertices of S, and there is an edge, called a visibility edge,
between vertices v and w if these vertices are mutually
visible.
To find the shortest-path between two points, these points are
added as new nodes to the visibility graph and the visibility edges
between these new nodes and the old nodes are added respectively.
The value of each edge is set to the Euclidean distance between its
two nodes. Then by running the Dijkstra [
11] algorithm
from the source to the destination the shortest distance and
shortest-path between these two nodes is found.
4 System
4.1 Robot
Platform Requirements
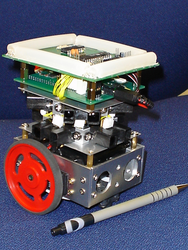 Figure 2: Prototype of Chatterbox, a small robot, running
Linux and equipped with different types of sensors and
emitters.
Figure 2: Prototype of Chatterbox, a small robot, running
Linux and equipped with different types of sensors and
emitters.
These experiments are run in simulation using Player/Stage, in
order to guide the design of a group of real robots. Our Chatterbox
project is building 40 small robots to study long-duration
autonomous robot systems. The robots run Player on Linux on Gumstix
single-board computers. They will work in large, office-like
environments: too large for the robot to store a complete world
map. The simulations use only sensing and actuation that will be
available on the real robots.
Robot controllers are written as clients to the Player robot
server, which provides a device-independent abstraction layer over
robot hardware. Stage provides simulated robot hardware to Player
by modeling the robots' movements and interactions with obstacles,
and generating appropriate sensor data.
4.2 Audio
Model Implementation
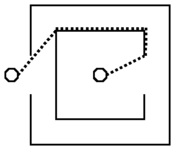
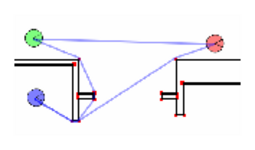
Figure 3: An example of a bitmap and a set of refraction
points. These three robots are sending audio signals and the lines
show the calculated shortest audio paths.
The proposed audio simulator is a Player client, based on Gerkey's
Playernav utility (included with the Player distribution). The
audio client obtains map and robot position data from Player, and
acts as a communication proxy between robots. Robots emit "sound"
by making a request to the audio client. Our audio model client
calculates the shortest distance between the transmitting robot and
all receiving robots. The intensity of the received signal is
determined by the distance traveled. If any of the robots receive a
sound above a minimum threshold, the audio client transfers the
sound data including received intensity and direction to the
receiving robot.
Our audio propagation model requires that obstacles be defined as a
set of polygons but the Player map interface provides obstacle maps
in a bitmap format. In order to convert the bitmap to a format that
can be used to generate a visibility graph quickly, a 3 ×3
mask is used to find obstacle corners. By scanning this 3 ×3
mask some points are labeled as refraction points, the points at
which audio can change direction. Fig.
3 shows an example of a set of refraction
points and the audio path found by this method.
4.3 Exploration
Two arbitrary, distinct world locations are defined as the source
and the sink, respectively, of resources for our transportation
task. The locations are marked with optical fiducials (hereafter
markers), visible in the on-board camera only over short
distances with line-of-sight. Robots must find the source and sink
locations and travel between them as quickly as possible. Without
global localization, the robots need to explore the world to find
the markers that indicate source and sink. On reaching a marker, a
robot stops there for a short, fixed amount of time intended to
model the robot doing some work at that location, such as grasping
an object. After this time is up, the robot seeks the other
location marker. This way of implementing the system permits marker
locations to change arbitrarily over time.
There are many different approaches that can be taken for
exploration to find markers. One suitable method is
frontier-based searching proposed by Yamauchi [
12], in
which each robot uses an occupancy grid with three states: empty,
obstacle, and unknown/unexplored for each cell to store the global
map. At the start, the entire world is unexplored, but as the robot
moves, the occupancy grid will be filled using the sensor readings.
Frontiers in this occupancy grid are defined as those empty cells
that have an unknown cell in their 8-connected neighborhood. Each
robot moves towards the nearest frontier and gradually it explores
all the traversable areas with a greedy strategy to minimize the
traveling cost. The exploration is complete when there are no more
accessible frontiers. The frontier-based approach guaranties that
the whole traversable area of the map will be explored. We use an
adaptation of this approach described below.
4.4 Path
Planning in a Local Map
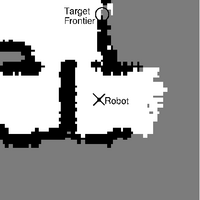
Figure 4: (a) Local map: an occupancy grid built by
a robot over a period of time. In this image, white shows
empty area, black shows known obstacles (enlarged by the
robot size), and gray shows unknown area. (b) Traversibility
map: the darker the cell color, the harder going to that cell is
(c) Potential field map: robot can follow the gradient to reach the
target.
Our constraints require that the robot has no
a priori
global map, has no means to globally localize itself, and has
conventional odometry with unbounded error growth. We wish to avoid
the memory and computational cost of producing a global map, yet
still perform effective exploration. Our approach is to maintain a
short-range occupancy grid of robot's current neighborhood,
centered at the robot. We call this occupancy grid a
local
map. As the robot moves, the local map is updated continuously
from sensor data. Information may "fall off" the edge of the local
map as the robot moves, and is lost. Figure
IV-D is an example of a local map built by one
robot over a period of time, in which white, black and grey cells
indicate empty, obstacle, and unknown areas respectively.
To explore the world, we use frontier-based exploration, where the
state of all cells outside the map is assumed to be
unknown.
This means that all empty cells on the map border are frontiers. We
modify the original frontier-based method so that each cell value
in the map expires after a fixed amount of time and reverts to
unknown. This is to cope with the dynamic elements of the
world such as other robots, which may look like obstacles to the
sensors.
For obstacle avoidance and planning we combine the local map with a
potential field path-planning method due to Batavia [
13]. Using the collected environment
information stored in the local map, first a
traversibility
map is built. The traversibility map is the result of applying
a distance transform to the obstacles in the local map. The
distance transform operator numbers each cell with its distance
from the nearest obstacle, so a non-empty cell is numbered as zero;
all its empty neighbors will be one and so on. In our
implementation, a city-block ("Manhattan") distance metric is used,
thus assuming travel is only possible parallel to the X and Y axes.
Figure
IV-D shows an example local
occupancy-grid map and Figure
IV-D shows the corresponding traversibility
map. Occupancy grid cells marked "unknown" are handled as empty
cells. An exponential function on the value of a cell in
traversibility map shows the cost of moving to that cell. This
forces the robot to maintain a suitable distance from obstacles
while not totally blocking narrow corridors and doorways.
A wave-front transform is used to generate a robot-guiding
potential field from the local map and traversibility map. The
field is represented by a bitmap in which the value of each cell
indicates the cost of moving from the goal to that point. It is
implemented by a flood fill starting from the target cell, valued
1, and numbering all other cells with their minimum travel cost
from the target. The cost function is the city-block distance plus
the risk of getting near to an obstacle. This risk cost is taken
directly from the corresponding cell in the traversibility map.
Figure
IV-D shows an example
potential field. By always moving from a cell into the
lowest-valued adjacent cell, the robot takes the optimal path to
the target. If implemented using FIFO queues, both steps of this
algorithm scale O(n), where n is the number of cells in the map - a
fixed value in our method.
To select the goal point on the local map, we use a cost function
which selects a frontier cell. Cell selection can be based on
multiple weighted factors including distance to that cell, a random
weighting (to add stochasticity to help avoid loops), or a bias in
favor of the current direction of robot (in order to prevent the
robot from making cyclic decisions - a problem introduced by using
local instead of global map). Another important factor can be the
information received from other sources and sensors such as audio
communication with other robots [
14].
4.5 Use of
the Audio
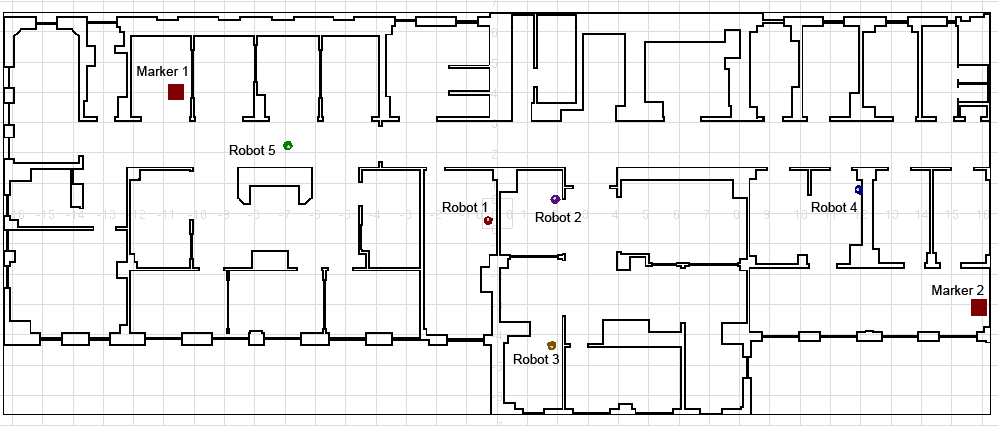
 Figure 5: Initial configuration 1 in a partial hospital
floor plan ("hospital_section" in Stage). The map is 34x14 square
meters. The robots (small circles are 15cm in diameter). The
markers, shown as boxes, are resource locations.
Figure 5: Initial configuration 1 in a partial hospital
floor plan ("hospital_section" in Stage). The map is 34x14 square
meters. The robots (small circles are 15cm in diameter). The
markers, shown as boxes, are resource locations.
We aim to discover whether audio signaling can be used to improve
performance of a robot system searching for the markers. To be
feasible for real-world implementation in the short-term, we allow
only very simple audio messages, representing single values from a
pre-set range. This will be something similar to robots using DTMF
codes, as used by a touch-tone telephone, to talk to each other.
When a marker is seen and while it remains in view, the robot
generates a DTMF tone identifying the marker. By continuing to
announce the marker for a short period of time after the marker is
no longer in view, it allows other robots to continue to receive
location information, thereby increasing their chance of finding
the markers. In our experiments this time is set to 10 seconds.
In addition to receiving the marker number, other robots in the
audible range will know audio volume and the direction from which
the sound arrived. This is feasible in the real world: Valin
[
4] showed how microphone arrays can be used
to detect the angle with high precision. However, a far more simple
configuration is to have only two microphones and the direction can
be simplified to two states: depending on the microphone placement,
this could be front or rear, left or right.
To use this information from the audio sensor, the messages
received are stored in a queue with a time label. Each cell can now
be scored based on the received messages and this score is added to
the distance cost for scoring frontiers. These are the factors for
scoring each cell based on one message:
- Difference of cell direction compared to message direction
(-1.0 to 1.0)
- Message age (0.0 to 1.0)
- Message intensity (0.0 and 1.0)
In our implementation, for a cell c=(c
x,c
y),
and the set M of messages, where each message is
m=(m
data,m
θ,m
level,m
age),
the cost function is:
| f(c,M)=|c| + G − w |
∏
m ∈
M
|
(Θ(mdir−cdir)Ω(mage)
Φ(mlevel)) |
|
In which, |c|=√{c
x+c
y} is the cell
distance from robot. G is a small Gaussian random with a mean of
zero. w is a fixed weight. For 0 < x < 2π,
Θ(x)=[(π−2x)/(π)], which is the direction
difference factor. This is an approximation for Θ(x)=cos(x).
Ω(m
age) is the message age factor and
Ω(m
level) is the intensity factor. Messages are
discarded from the queue after three minutes.
4.6 Sensor
Choices
The swarm is made up of small two-wheeled robots, 15cm in diameter
(a little larger than a CD) and the same height and a maximum speed
of 30cm/second. The simulated sensors are configured to match the
real devices as closely as possible given the limitations of Stage.
For avoiding obstacles and to build a map of robot surroundings 8
infrared sensors with a range of 1.5m (similar to the real SHARP
GP2D12 device) are used.
To identify the markers showing the position of working areas, a
camera and a simple blob finder with a range of 5 meters is
assumed. Any fiducial-type sensor with the ability to guide the
robot to a nearby line of sight object can be substituted.
Two configurations of the simulated audio sensor were tested:
omni-directional, i.e. giving high-resolution information about the
direction to a sound source, and bi-directional, giving only 1 bit
of direction data. The maximum audio receiving range was set to
15m.
5 Experiment
The environment map for this experiment is the "hospital section"
map distributed with Stage, which is derived from a CAD drawing of
a real hospital. It is a general office-like environment with rooms
and corridors with a size of 34 by 14 meters. The map is large
compared to the robot's size and sensor ranges (it is 227 ×93
times our 15 ×15cm robot size). A
starting
configuration is a list of starting position and angle for
robots and the position of the two markers (working areas). A
valid starting configuration is a starting configuration in
which no object is placed over an obstacle and all markers are
reachable. Ten different valid starting configurations are randomly
generated. To illustrate, configuration 1 is shown in
Figure
5.
A
job is defined as finding one marker and spending 30
seconds there working (loading/unloading) and then changing the
goal to another marker. In each experiment the time for completing
a total of 20 jobs by 5 robots is measured. So it is possible that
different robots will complete different number of jobs. This means
that if one robot becomes stuck somewhere, the other robots can
continue to work.
6 Results
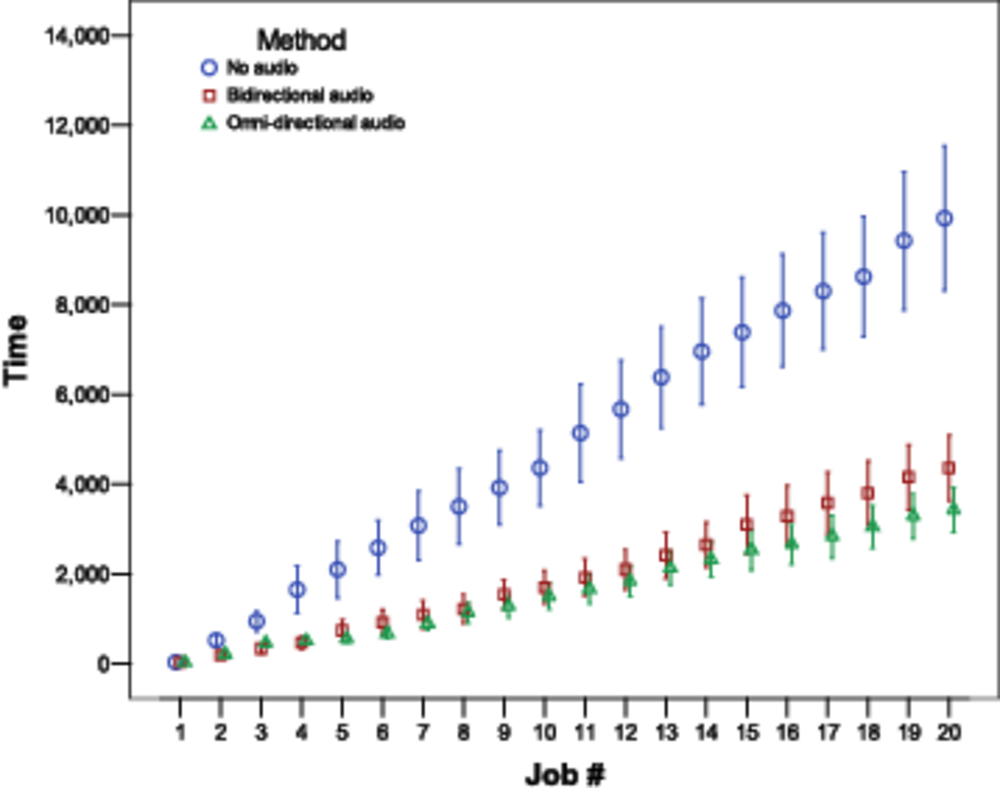
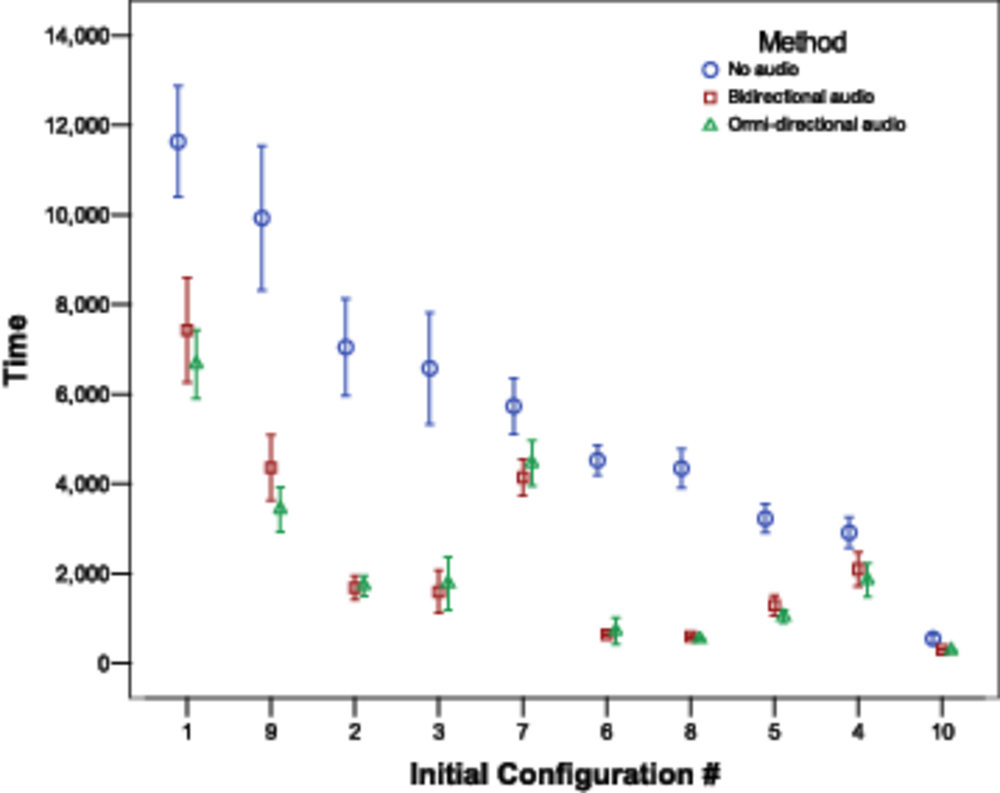
Figure 6: The mean and 95% confidence interval time (in
seconds) to (a) finish each job in one of the initial
configurations (configuration number 9) (b) finish all 20 jobs in
all configurations. The configurations are reordered by the time of
"no audio" method for the sake of clarity.
We ran 20 experiments of 3 different methods over 10 different
starting configurations, for a total of 600 simulation trials.
Figure
VI shows the mean and the 95%
confidence interval of time to finish each job in one of the
initial configurations (Configuration number 9). The chart shown in
Figure
VI shows the time to finish the
total 20 jobs for all initial configurations. It can be seen that
the most important factor in the total time to finish the job is
the initial configuration and especially the position of the two
working areas. In configuration 1, shown in Figure
5, the two markers are far apart, and the
job-completion times seen in Figure
VI
for configuration 1 are large. However, in many configurations,
differences in mean completion times between the three sensing
methods are visible.
To analyze these differences we ran
t-tests between every
pair of methods on each map to determine which pairs have
significantly different means. We found that:
- For every map, there is a statistically significant difference
between no audio and any method which uses attracting audio.
- Only two of the configurations using omni-directional sensors
were statistically different from bi-directional ones
- Of these two, the differences were inconsistent.
From these results we can conclude that
- using attracting audio can affect the performance
significantly, and
- as there is no statistical significant difference between an
omni-directional and a bi-directional microphone, the use of a
simple bi-directional can be recommended.
It should be noted that the size of the performance gain given by
using audio is likely to be sensitive to the implementation
parameters and environment properties. It also seems likely that
the 1-bit audio direction sensor would not perform so well in less
constrained environments.
7 Conclusion
and Future Work
We have shown that using audio communication can increase the
performance of a realistic group task significantly. This can be
done even by using simple robots, each equipped with a speaker and
two microphones as a bi-directional sensor, i.e. using one bit of
audio signal direction information. The task and implementation
presented here can be used as starting point for research in this
field and there are many different aspects which could usefully be
studied. There are several implementation parameters which can be
changed, potentially affecting the overall performance of the
system. Nonetheless, we believe that these simulation results are a
useful predictor of the gross behavior of this system in the real
world. Our future experiments will test this hypothesis.
Due to its physical interaction with the robot's environment, audio
promises to be a very interesting sensor modality. We plan to
explore using frequency information in ambient and transmitted
audio signals, for example to characterize locations by their
"sound". As an example, our lab, offices and hallway have very
different ambient sound and sound-reflection properties: each can
be easily recognized by sound alone. This could be useful for
localization.
We also plan to explore the use of the audio in groups of agents,
based on models of signaling behavior in birds and insects.
Possible applications include resource management, territory
formation, and task allocation.
Another aspect of our work is to develop the robots, simulation and
measurement tools for testing the algorithms. We also plan to
further develop and test the audio propagation model, and make it
available to the Player/Stage community.
References
- [1]
- J. Huang, T. Supaongprapa, I. Terakura,
N. Ohnishi, and N. Sugie, "Mobile robot and sound
localization," in Proc. IEEE Int. Conference on Intelligent
Robots and Systems (IROS'97), September 1997.
- [2]
- E. Østergaard, M. J. Matari\'c, and G. S.
Sukhatme, "Distributed multi-robot task allocation for emergency
handling," in Proc. IEEE Int. Conference on Intelligent Robots
and Systems (IROS'01), 2001, pp. 821 - 826.
- [3]
- M. Konishi, "Sound localization in owls," in
Elsevier's Encyclopedia of Neuroscience, E. G.
Adelman and B. H. Smith, Eds., 1999, pp. 1906-1908.
- [4]
- J. Valin, F. Michaud, J. Rouat, and
D. Létourneau, "Robust sound source localization using
a microphone array on a mobile robot," in Proc. IEEE Int.
Conference on Intelligent Robots and Systems (IROS'03), 2003.
- [5]
- B. Gerkey, R. T. Vaughan, and A. Howard, "The
Player/Stage project: Tools for multi-robot and distributed sensor
systems," in Proc. Int. Conference on Advanced Robotics
(ICAR'03), 2003, pp. 317-323.
- [6]
- R. T. Vaughan, K. Støy, G. S. Sukhatme,
and M. J. Matari\'c, "Blazing a trail: Insect-inspired
resource transportation by a robot team," in Int. Symposium on
Distributed Autonomous Robotic Systems (DARS'02), 2000.
- [7]
- --, "Go ahead, make my day: robot conflict resolution by
aggressive competition," in Proc. of Int. Conf. Simulation of
Adaptive Behaviour, Paris, France, 2000.
- [8]
- 2 plus 43 minus 4 C. Carollo, "Sound propagation in 3d
environments," in Game Developers Conference (GDC'02),
2002. [Online]. Available: http://www.gamasutra.com/features/gdcarchive/2002/
- [9]
- M. de Berg, M. van Kreveld, M. Overmars, and
O. Schwarzkopf, Computational Geometry: Algorithms and
Applications. NY: Springer, 1997.
- [10]
- 2 plus 43 minus 4 E. W. Weisstein. (2002) Mathworld:
Visibility graph. [Online]. Available:
http://mathworld.wolfram.com/VisibilityGraph.html
- [11]
- E. W. Dijkstra, "A note on two problems in connexion with
graphs," in Numerische Mathematik.
Mathematisch Centrum, Amsterdam, The Netherlands, 1959,
vol. 1, pp. 269-271.
- [12]
- B. Yamauchi, "A frontier-based approach for autonomous
exploration," in Proc. 1997 IEEE Int. Symposium on
Computational Intelligence in Robotics and Automation, 1997.
- [13]
- P. Batavia and I. Nourbakhsh, "Path planning for the
cye robot," in Proc. IEEE Int. Conference on Intelligent Robots
and Systems (IROS'00), vol. 1, October 2000, pp. 15 - 20.
- [14]
- S. Moorehead, R. Simmons, and W. R. L.
Whittaker, "Autonomous exploration using multiple sources of
information," in Proc. IEEE Int. Conference on Robotics and
Automation (ICRA'01), May 2001.